De mekanisk fördel det är den dimensionlösa faktorn som kvantifierar förmågan hos en mekanism att förstärka - i vissa fall minska - den kraft som utövas genom den. Konceptet gäller alla mekanismer: från en sax till en sportbilsmotor.
Tanken är att en maskin omvandlar den kraft som användaren tillämpar på den till en mycket större kraft som representerar vinst eller minskar den för att utföra en känslig uppgift.

Man måste komma ihåg att en del av den kraft som tillämpas oundvikligen investeras i att motverka friktion när man använder en mekanism. Det är därför den mekaniska fördelen klassificeras i verklig mekanisk fördel och idealisk mekanisk fördel..
Artikelindex
Den verkliga mekaniska fördelen med en maskin definieras som förhållandet mellan storleken på kraften som utövas av maskinen på belastningen (uteffekt) och den kraft som krävs för att driva maskinen (ingångskraft):
Verklig mekanisk fördel VMR = Exit Force / Entry Force
Medan den idealiska mekaniska fördelen för sin del beror på avståndet med ingångskraften och avståndet med utgångskraften:
Idealisk mekanisk fördel VMI = Inloppsavstånd / Utloppsavstånd
Att vara kvoter mellan kvantiteter med samma dimensioner, båda fördelarna är dimensionlösa (utan enheter) och också positiva.
I många fall, såsom skottkärra och hydraulisk press, är den mekaniska fördelen större än 1, och i andra är den mekaniska fördelen mindre än 1, till exempel i fiskespö och gripare..
VMI är relaterat till det mekaniska arbetet som utförs vid maskinens ingång och utgång. Arbetet vid ingången, som vi kommer att kalla Wi, den är uppdelad i två komponenter:
Wi = Arbeta för att övervinna friktion + Träna
En ideal maskin behöver inte göra arbete för att övervinna friktionen, därför skulle arbetet vid ingången vara detsamma som vid utgången, betecknad Weller:
Arbeta vid inresa = Arbeta vid utgång → Wi = Weller.
Eftersom arbetet i detta fall är kraft gånger avstånd har vi: Wi = Fi . si
Där Fi och jai är den initiala kraften respektive avståndet. Utgångsarbetet uttrycks analogt:
Weller= Feller . seller
I detta fall Feller och jaeller är kraften och avståndet som maskinen levererar respektive. Nu matchas båda jobb:
Fi . si = Feller . seller
Och resultatet kan skrivas om i form av kvoter av krafter och avstånd:
(si / seller) = (Feller / Fi)
Exakt avståndskvoten är den idealiska mekaniska fördelen, enligt definitionen i början:
VMI = si / seller
Det är rimligt att tänka på effektiviteten i omvandlingen mellan båda jobb: input och output. Betecknar som och för effektivitet definieras detta som:
e = Utgångsarbete / Ingångsarbete = Weller / Wi = Feller . seller / Fi . si
Effektivitet är också känd som mekanisk prestanda. I praktiken överstiger utgångsarbetet aldrig insatsarbetet på grund av friktionsförluster, därför kvoten som ges av och är inte längre lika med 1 utan mindre.
En alternativ definition innefattar kraft, vilket är det arbete som utförs per tidsenhet:
e = Effekt / Effekt = Peller / Pi
Den faktiska mekaniska fördelen definieras helt enkelt som kvoten mellan utgångskraften Feller och ingången Fi:
VMR = Feller/ Fi
Effektivitet och kan skrivas om i form av VMI och VMR:
e = Feller . seller / Fi . si = (Feller / Fi). (seller/ si) = VMR / VMI
Därför är effektiviteten kvoten mellan den verkliga mekaniska fördelen och den idealiska mekaniska fördelen, varvid den förra är mindre än den senare..
I praktiken beräknas VMR genom att bestämma effektiviteten och känna till VMI:
VMR = e. VMI
Beräkningen av den mekaniska fördelen beror på typen av maskin. I vissa fall bör det utföras genom överföring av krafter, men i andra typer av maskiner, som till exempel remskivor, är det vridmomentet eller vridmomentet τ som överförs.
I detta fall beräknas VMI genom att jämföra momenten:
Utgångsmoment = Ingångsmoment
Vridmomentets storlek är τ = F.r.sen θ. Om kraften och lägesvektorn är vinkelräta finns mellan dem en vinkel på 90º och sin θ = sin 90º = 1, vilket ger:
Feller . reller = Fi . ri
I mekanismer som den hydrauliska pressen, som består av två kamrar som är sammankopplade av ett tvärgående rör och fyllt med en vätska, kan tryck överföras med fritt rörliga kolvar i varje kammare. I så fall beräknas VMI av:
Utloppstryck = Inloppstryck
Spaken består av en tunn stång som stöds av ett stöd som kallas en stödpunkt, som kan placeras på olika sätt. Genom att tillämpa en viss kraft, kallad ”maktkraft”, övervinns en mycket större kraft, vilket är ladda eller uthållighet.

Det finns flera sätt att lokalisera stödpunkten, kraften och belastningen för att uppnå en mekanisk fördel. Figur 3 visar förstklassig spak, liknande en vippa, med stödpunkten placerad mellan kraftkraften och lasten..
Till exempel kan två personer med olika vikt balanseras på gungbräda eller upp och ner om de sitter tillräckligt långt från stödpunkten.
För att beräkna VMI för första gradsspaken, eftersom det inte finns någon översättning och ingen friktion beaktas, men det finns rotation, utjämnas momenten, med vetskapen att båda krafterna är vinkelräta mot stapeln. Här Fi är kraftkraften och Feller är belastningen eller motståndet:
Feller . reller = Fi . ri
Feller / Fi = ri / reller
Per definition VMI = Feller / Fi , sedan:
VMI = ri / reller
I avsaknad av friktion: VMI = VMR. Observera att VMI kan vara större eller mindre än 1.
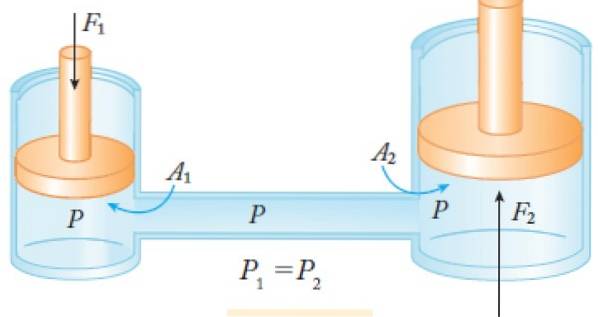
Den idealiska mekaniska fördelen med hydraulpressen beräknas genom trycket, som enligt Pascals princip överförs helt till alla punkter i vätskan som är innesluten i behållaren.
Ingångskraften F1 i figur 2 appliceras den på den lilla kolven i område A1 till vänster och utgångskraften Ftvå erhålls i den stora kolven i område Atvå till höger. Sedan:
Inloppstryck = Utloppstryck
Tryck definieras som kraft per ytenhet, därför:
(F1 / TILL1) = (Ftvå / TILLtvå) → Atvå / TILL1 = Ftvå / F1
Eftersom VMI = Ftvå / F1, den mekaniska fördelen erhålls genom kvoten mellan områdena:
VMI = Atvå / TILL1
Tycka omtvå > A1, VMI är större än 1 och effekten av pressen är att multiplicera kraften som appliceras på den lilla kolven F1.



Ingen har kommenterat den här artikeln än.