
De högerhandregel är en minnesresurs för att fastställa riktningen och känslan för vektorn som härrör från en vektorprodukt eller tvärprodukt. Det används ofta i fysik, eftersom det finns viktiga vektormängder som är resultatet av en vektorprodukt. Så är exempelvis vridmoment, magnetisk kraft, vinkelmoment och magnetiskt moment.
Låt vara två generiska vektorer till Y b vars tvärprodukt är till x b. Modulen för en sådan vektor är:
till x b = a.b. i α
Där α är minsta vinkel mellan till Y b, medan a och b representerar dess moduler. För att urskilja vektorerna i deras moduler används fetstil.
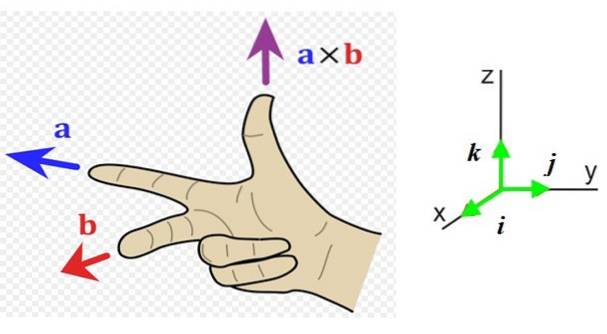
Nu måste vi veta riktningen och känslan för denna vektor, så det är bekvämt att ha ett referenssystem med de tre rymdriktningarna (figur 1 till höger). Enhetsvektorerna i, j Y k de pekar respektive mot läsaren (utanför sidan), till höger och uppåt.
I exemplet i figur 1 till vänster, vektorn till går till vänster (riktning Y negativa och pekfingret på höger hand) och vektorn b går till läsaren (riktning x positivt, långfinger på höger hand).
Den resulterande vektorn till x b har tumriktningen uppåt i riktningen z positiv.
Artikelindex
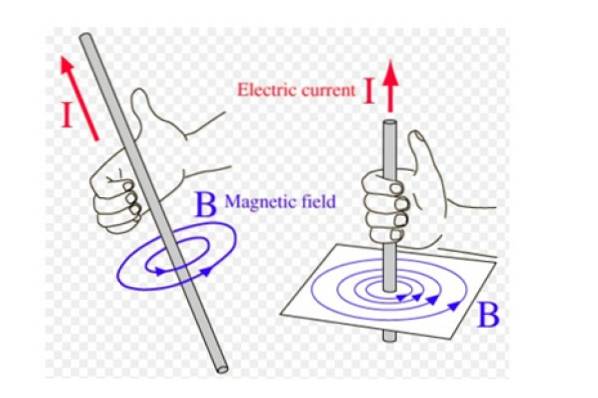
Denna regel, även kallad höger tumregel, Det används mycket när det finns magnituder vars riktning och riktning roterar, såsom magnetfältet B produceras av en tunn, rak tråd som bär en ström.
I detta fall är magnetfältlinjerna koncentriska cirklar med tråden, och rotationsriktningen erhålls med denna regel på följande sätt: höger tumme pekar i strömriktningen och de återstående fyra fingrarna är krökta i riktning mot landsbygden. Vi illustrerar konceptet i figur 2.
Figuren nedan visar en alternativ form av högerregeln. Vektorerna som visas i illustrationen är:
-Hastighet v av en punktladdning q.
-Magnetiskt fält B inom vilken lasten rör sig.
-FB den kraft som magnetfältet utövar på laddningen.
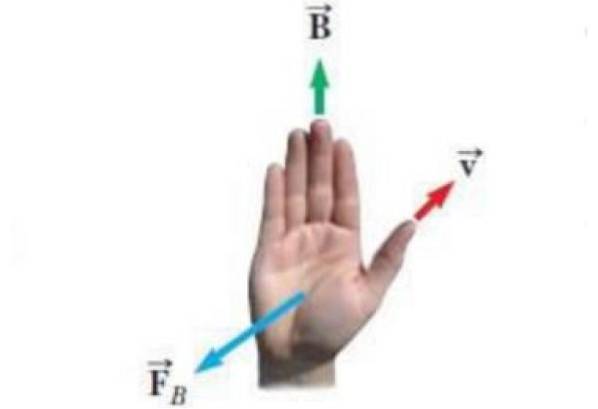
Ekvationen för den magnetiska kraften är FB = qv x B och regeln för höger hand att känna riktningen och känslan av FB appliceras så här: tummen pekar enligt v, de fyra återstående fingrarna placeras enligt fält B. Sedan FB är en vektor som kommer ut ur handflatan, vinkelrät mot den, som om den trycker på lasten.
Anteckna det FB Jag skulle peka i motsatt riktning om laddningen q var negativ, eftersom vektorprodukten inte är kommutativ. Faktiskt:
till x b = - b x till
Högerhandregeln kan tillämpas för olika fysiska kvantiteter, låt oss veta några av dem:
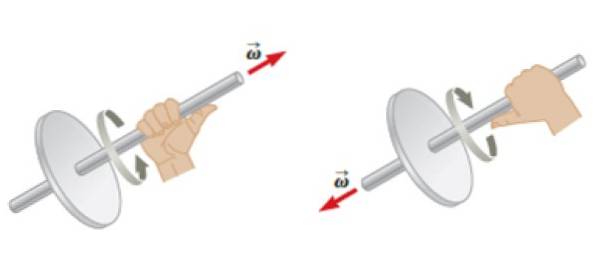
Båda vinkelhastigheterna ω som vinkelacceleration a de är vektorer. Om ett objekt roterar kring en fast axel är det möjligt att tilldela riktningen och avkänningen av dessa vektorer med hjälp av högerhandregeln: de fyra fingrarna är böjda efter rotation och tummen ger omedelbart riktningen och känslan av vinkelhastighet ω.
För sin del vinkelacceleration a kommer att ha samma adress som ω, men dess betydelse beror på om ω ökar eller minskar i storlek över tiden. I det första fallet har båda samma riktning och känsla, men i det andra kommer de att ha motsatta riktningar..
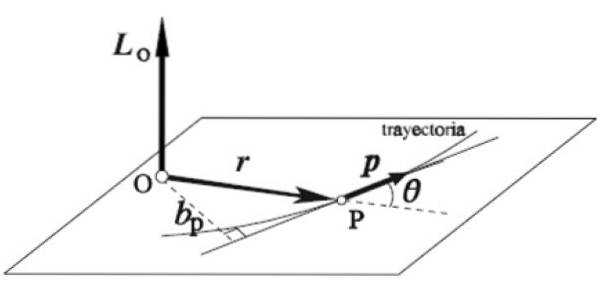
Vinkelmomentvektorn LELLER av en partikel som roterar runt en viss axel O definieras som vektorprodukten för dess momentana positionsvektor r och linjär fart sid:
L = r x sid
Regeln för höger hand tillämpas på detta sätt: pekfingret placeras i samma riktning och känsla av r, långfingret på det av sid, båda på ett horisontellt plan, som i figuren. Tummen förlängs automatiskt vertikalt uppåt vilket indikerar riktningen och känslan av vinkelmoment LELLER.
Toppen i figur 6 snurrar snabbt med vinkelhastighet ω och dess symmetriaxel roterar långsammare runt den vertikala axeln z. Denna rörelse kallas precession. Beskriv krafterna som verkar på snurret och effekten de ger.
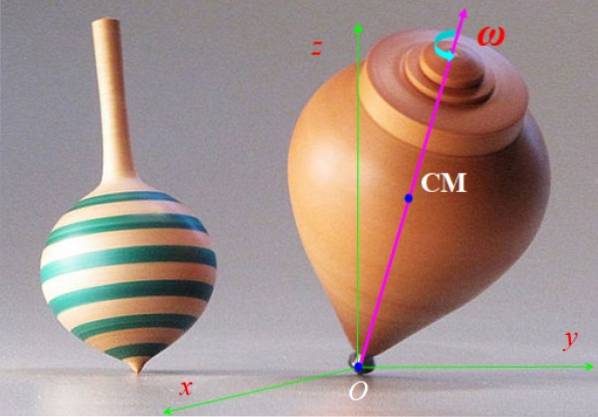
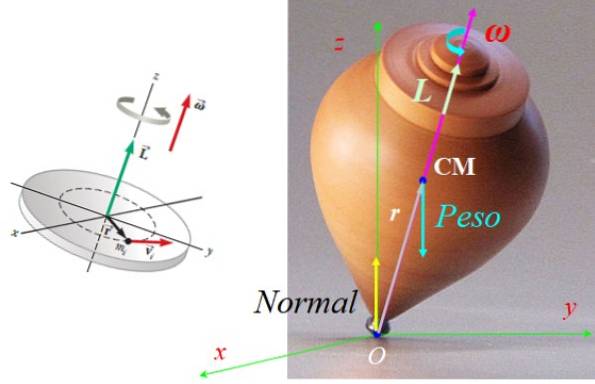
Krafterna som verkar på toppen är normala N, appliceras på stödpunkten med marken O plus vikten Mg, appliceras i centrum av massan CM, med g gravitationens accelerationsvektor, riktad vertikalt nedåt (se figur 7).
Båda krafterna balanserar, därför rör sig inte toppen. Men vikten ger ett vridmoment eller vridmoment τ netto med avseende på punkt O, ges av:
τELLER = rELLER x F, med F = Mg.
Vad r och Mg de är alltid i samma plan som toppen roterar, enligt vridmomentet till höger τELLER ligger alltid på planet xy, vinkelrätt mot båda r Vad g.
Anteckna det N producerar inte ett vridmoment med avseende på O, eftersom dess vektor r med avseende på O är noll. Detta vridmoment ger en förändring i vinkelmomentet som får toppen att gå före Z-axeln..
Ange riktningen och känslan för vinkelmomentvektorn L på toppen av figur 6.
Varje punkt på toppen har massa mi, hastighet vi och positionsvektor ri, när den roterar runt z-axeln. Vinkelmoment Li av nämnda partikel är:
Li = ri x sidi = ri x mivi
Med tanke på ri Y vi är vinkelräta, storleken på L det är:
Li = mirivi
Linjär hastighet v är relaterad till vinkelhastigheten ω genom:
vi = riω
Därför:
Li = miri (riω) = miritvåω
Den totala vinkelmomentet för snurra L är summan av vinkelmomentet för varje partikel:
L = (∑miritvå ) ω
∑ miritvå är tröghetsmomentet I av toppen, då:
L= Jagω
Därför L Y ω har samma riktning och känsla, som visas i figur 7.



Ingen har kommenterat den här artikeln än.